Abstract
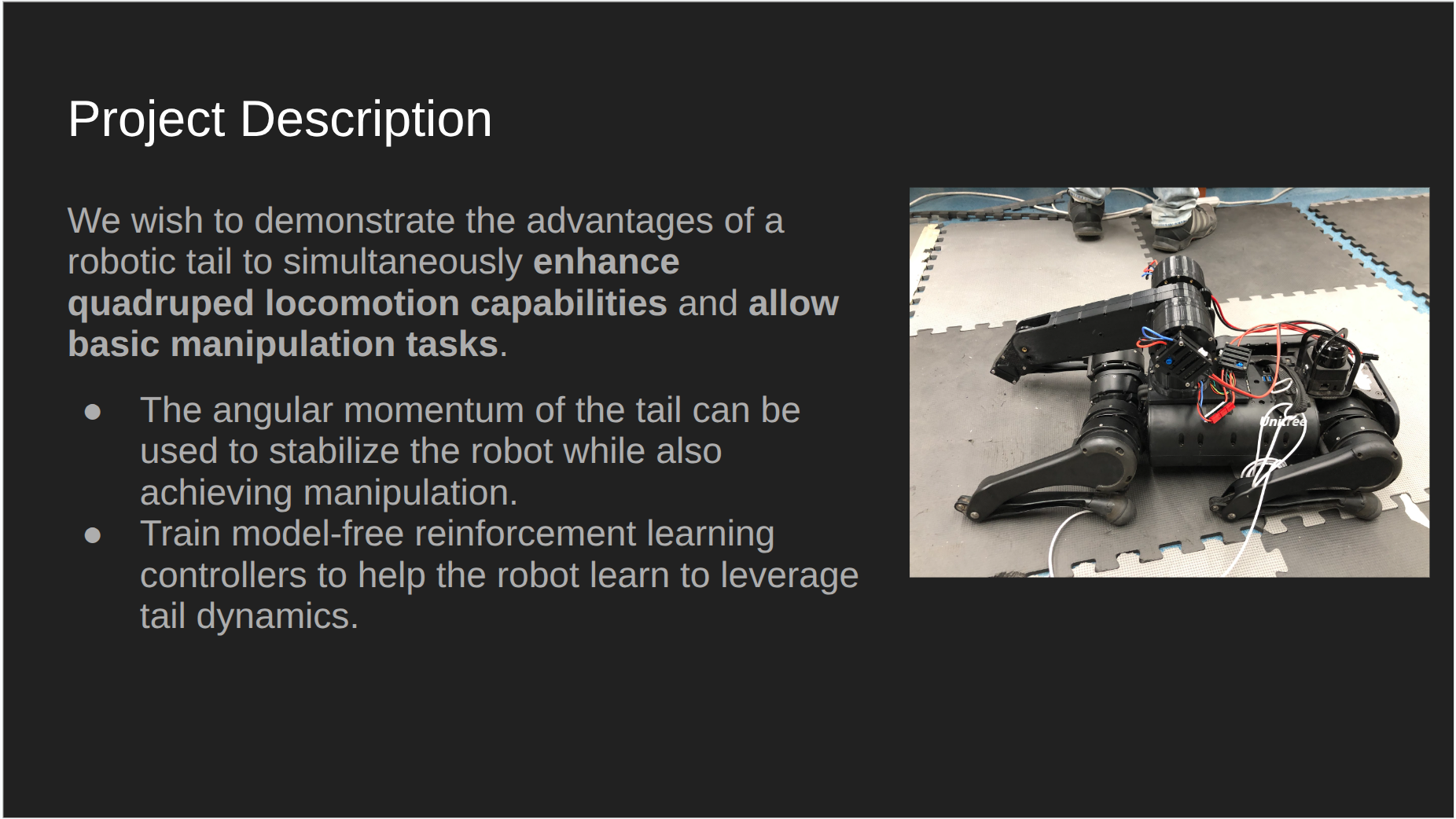
The goal of this project is to design a tail for the Unitree A1 robot to enhance agility, mobility, and stability during locomotion and enable basic manipulation tasks. The tail acts as both a counterweight and mobile manipulator to enable basic manipulation. I worked on this project during my extended visit with the Hybrid Robotics Lab at UC Berkeley (May 2022 - Jan 2023).
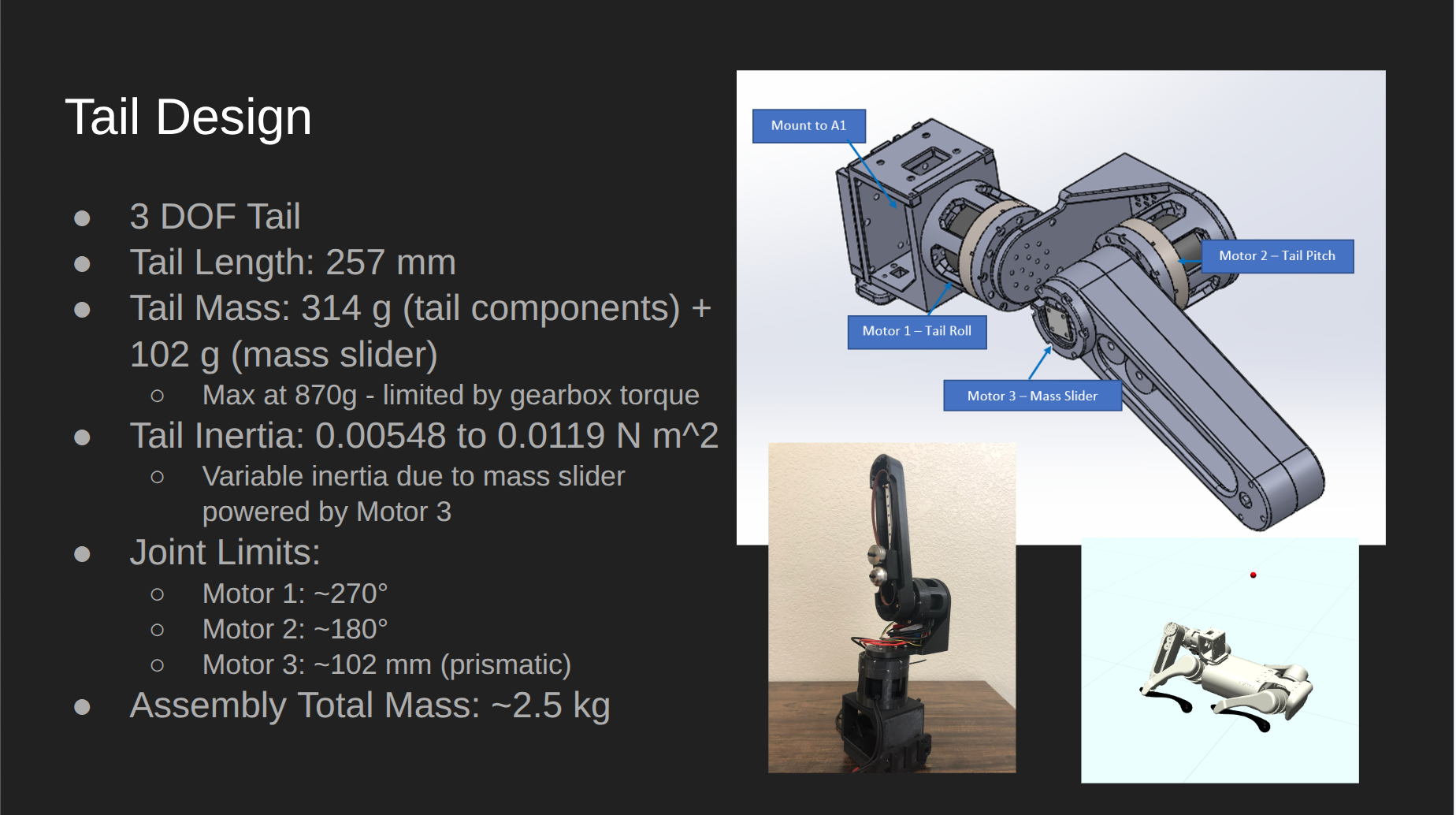
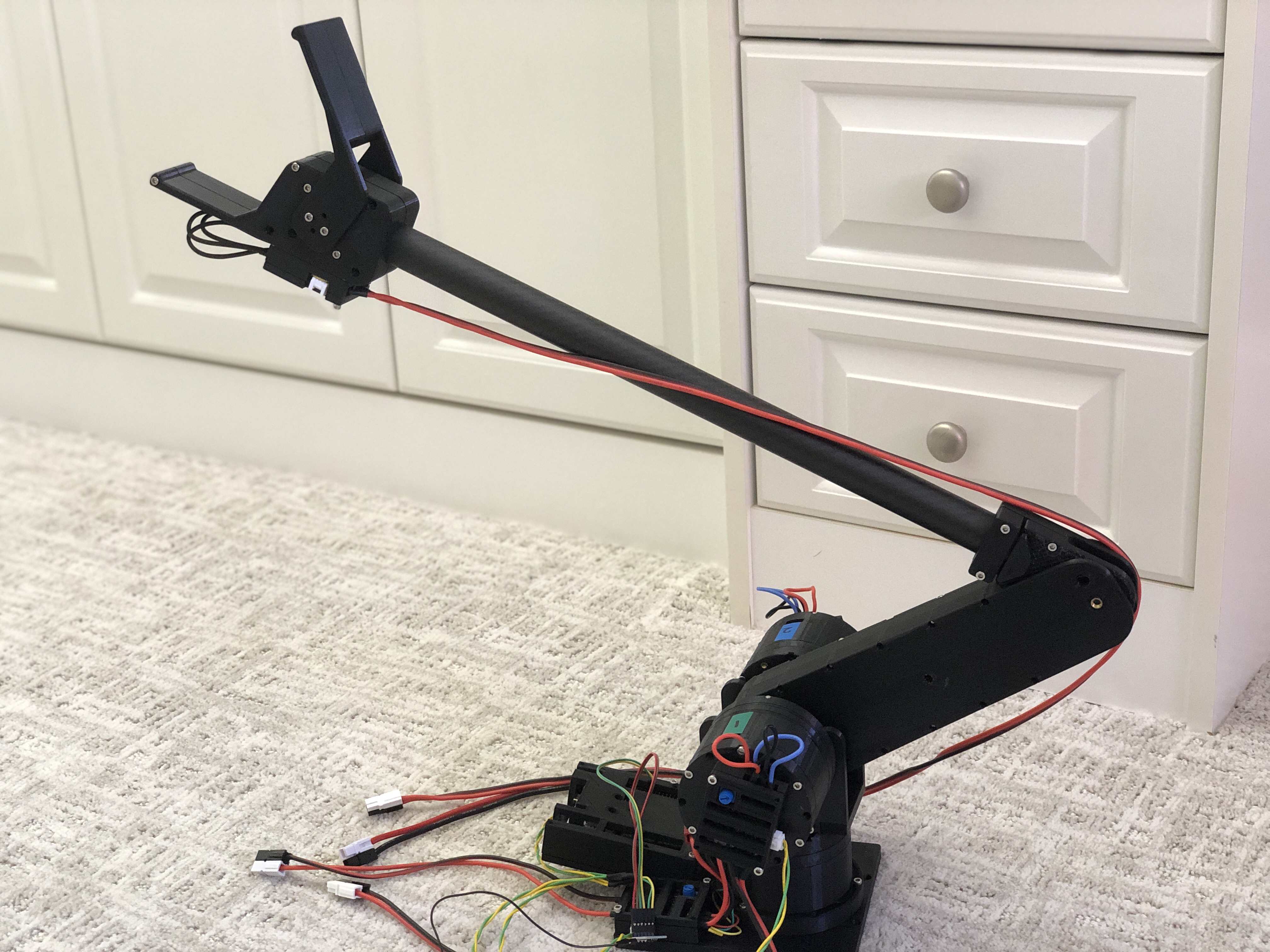
The tail is a 3D-printed, 3 DoF, serial mechanism driven by custom QDD actuators.
As shown in the photo below, the tail also has a 1 DoF gripper at the end effector to allow simple manipulation.
We also explored using model-free reinforcement learning (RL) to train a locomotion policy in NVIDIA Isaac Gym. The training pipeline follows this paper closely. Briefly, we use the PPO algorithm and standard RL training tricks such as domain randomization and curriculum learning to train a robust locomotion policy in simulation.
Videos
Video of A1 robot with tail attached:
Isaac Gym training of a RL locomotion policy for the A1 quadruped with the designed tail. Training Code
Presentations
Click on the photos below to see a set of slides I presented to the Hybrid Robotics Group:
Group Presentation on Dec 2022:
Group Presentation on Aug 2022, showing the old design of the tail: